2025
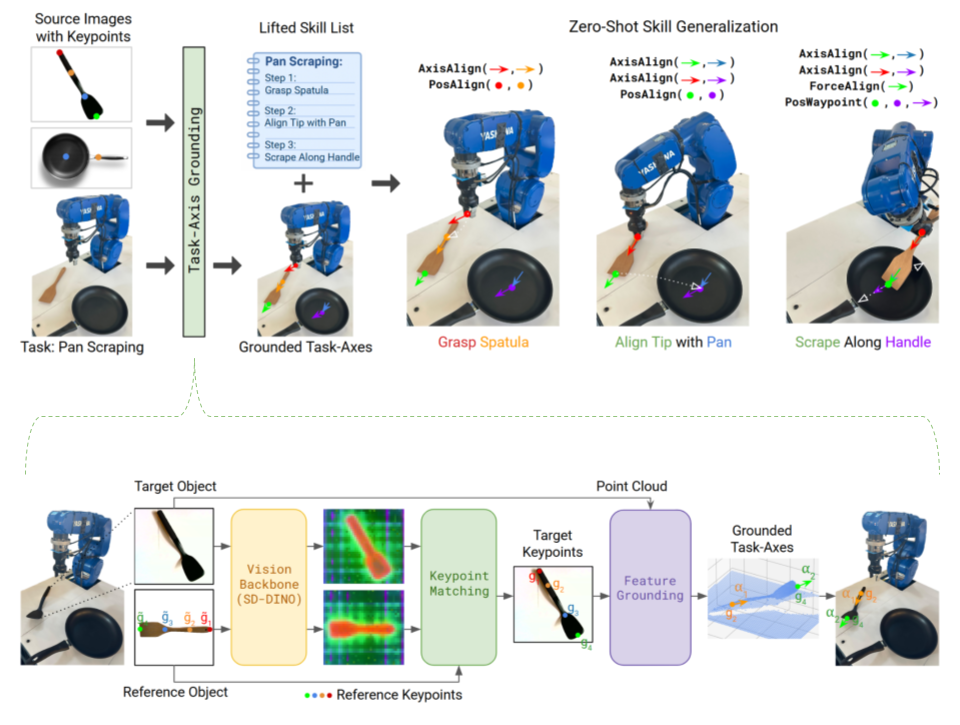
Grounded Task Axes: Zero-Shot Semantic Skill Generalization via Task-Axis Controllers and Visual Foundation Models
M. Yunus Seker, Shobhit Aggarwal, Oliver Kroemer
Humanoids 2025 - Accepted
Grounded Task Axes: Zero-Shot Semantic Skill Generalization via Task-Axis Controllers and Visual Foundation Models
M. Yunus Seker, Shobhit Aggarwal, Oliver Kroemer
Humanoids 2025 - Accepted
2024
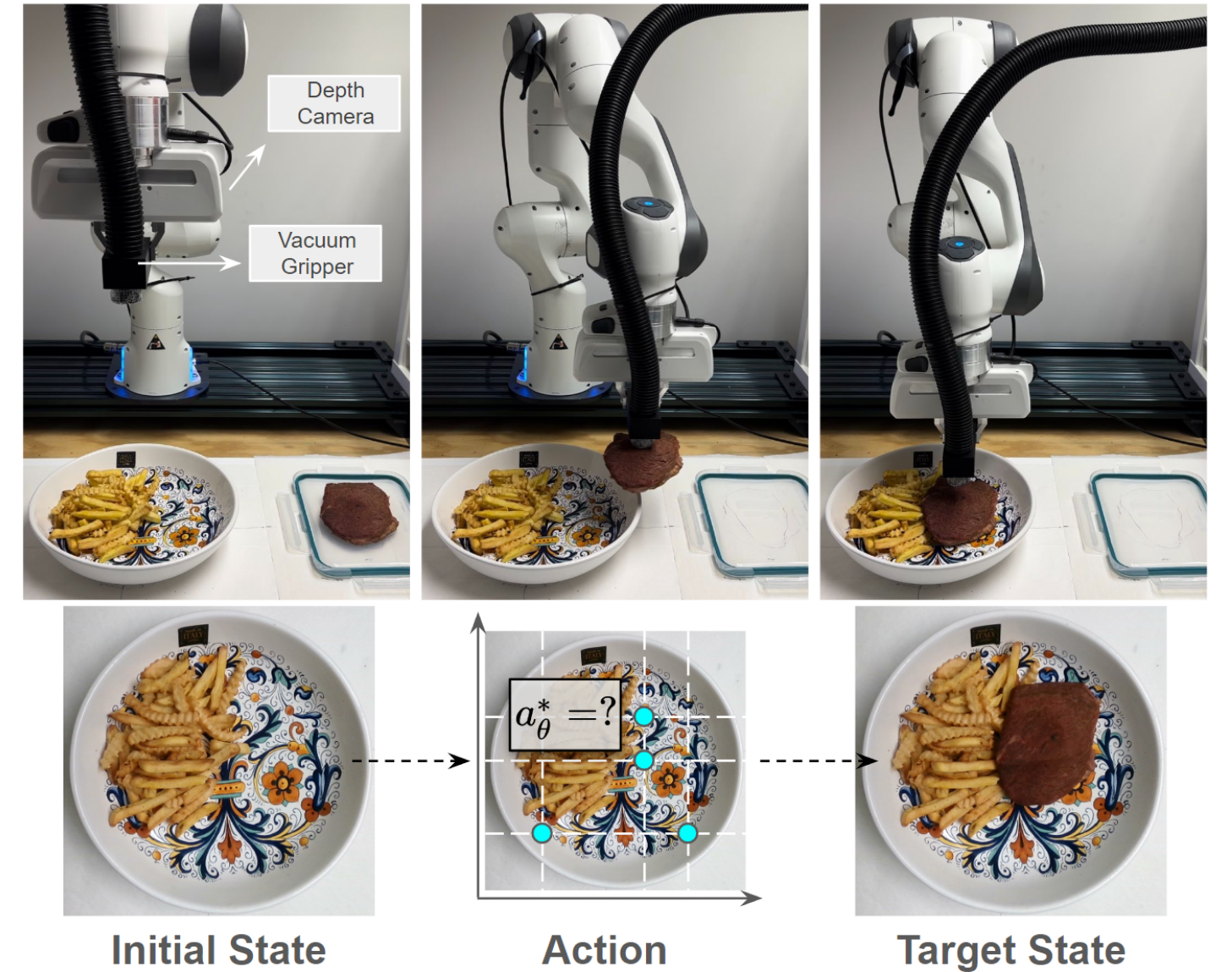
Leveraging Simulation-Based Model Preconditions for Fast Action Parameter Optimization with Multiple Models
M. Yunus Seker, Oliver Kroemer
[Paper] [ArXiv] [Video] [Presentation]
IROS 2024 - Accepted
Leveraging Simulation-Based Model Preconditions for Fast Action Parameter Optimization with Multiple Models
M. Yunus Seker, Oliver Kroemer
[Paper] [ArXiv] [Video] [Presentation]
IROS 2024 - Accepted
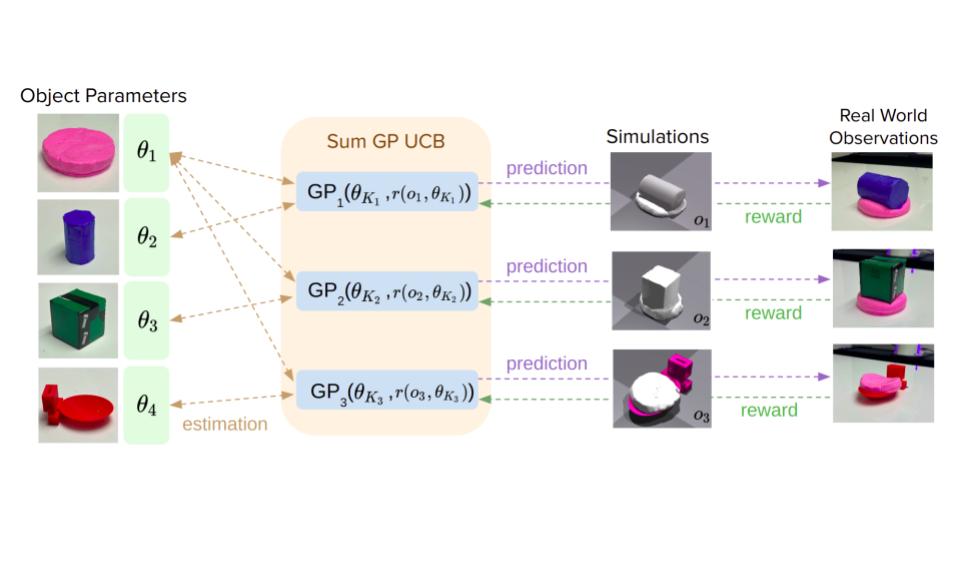
Estimating material properties of interacting objects using Sum-GP-UCB
M. Yunus Seker, Oliver Kroemer
[Paper] [ArXiv] [Video] [Presentation]
ICRA 2024 - Accepted
Estimating material properties of interacting objects using Sum-GP-UCB
M. Yunus Seker, Oliver Kroemer
[Paper] [ArXiv] [Video] [Presentation]
ICRA 2024 - Accepted
2022
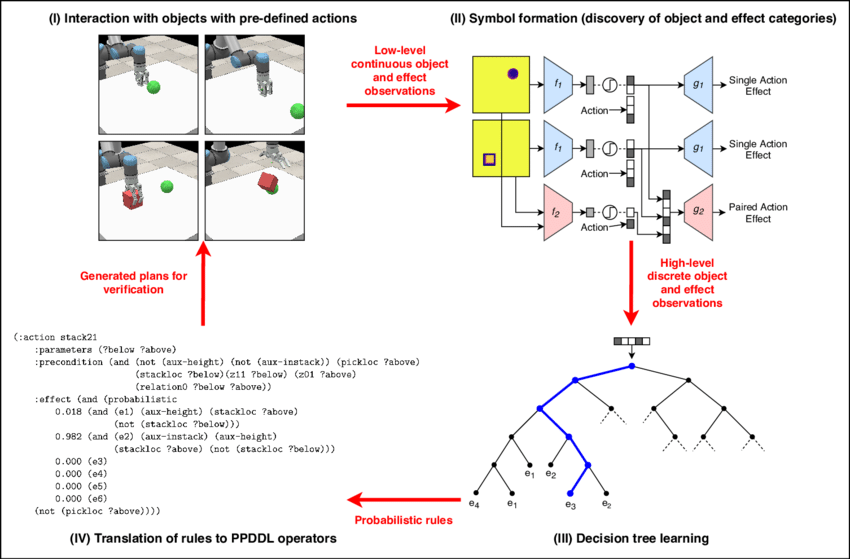
DeepSym: Deep Symbol Generation and Rule Learning for Planning from Unsupervised Robot Interaction
Alper Ahmetoglu, M. Yunus Seker, Justus Piater, Erhan Oztop, Emre Ugur
JAIR 2022 - Accepted
DeepSym: Deep Symbol Generation and Rule Learning for Planning from Unsupervised Robot Interaction
Alper Ahmetoglu, M. Yunus Seker, Justus Piater, Erhan Oztop, Emre Ugur
JAIR 2022 - Accepted
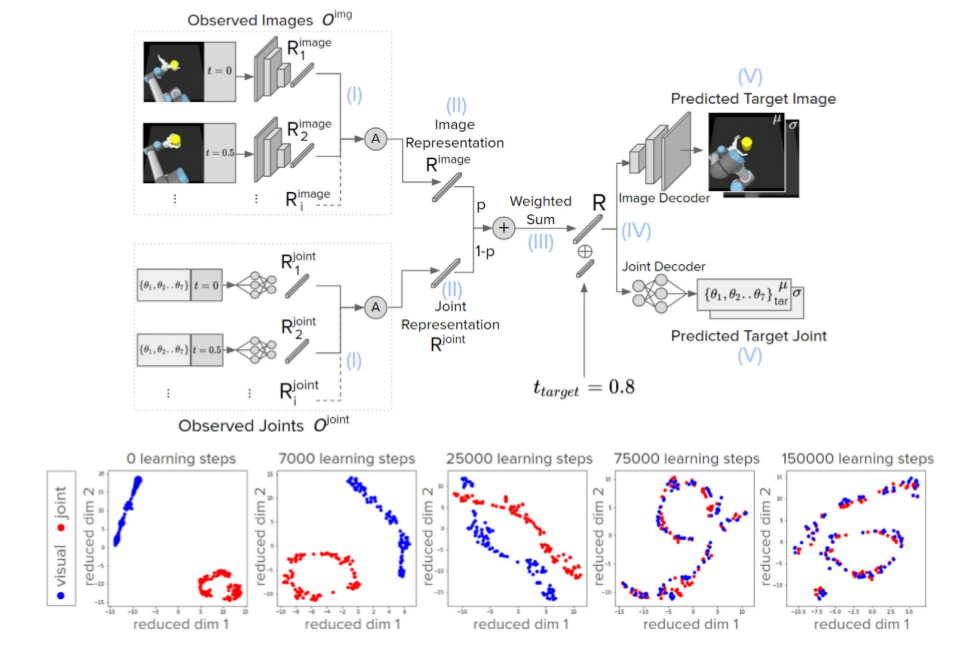
Imitation and mirror systems in robots through Deep Modality Blending Networks
M. Yunus Seker, Alper Ahmetoglu, Yukie Nagai, Minoru Asada, Erhan Oztop, Emre Ugur
[Paper] [ArXiv] [Video] [Code]
Neural Networks 2022 - Accepted
Imitation and mirror systems in robots through Deep Modality Blending Networks
M. Yunus Seker, Alper Ahmetoglu, Yukie Nagai, Minoru Asada, Erhan Oztop, Emre Ugur
[Paper] [ArXiv] [Video] [Code]
Neural Networks 2022 - Accepted
2021
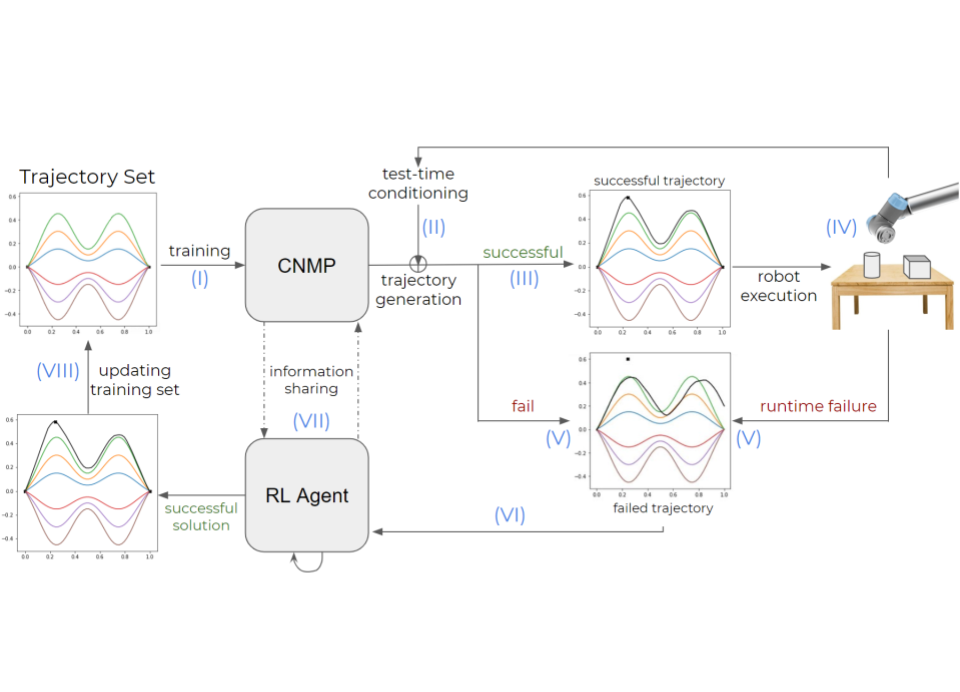
ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing
M. Tuluhan Akbulut, Erhan Oztop, M. Yunus Seker, Honghu Xue, Ahmet E. Tekden, Emre Ugur
CoRL 2021 - Accepted Oral Spotlight
ACNMP: Skill Transfer and Task Extrapolation through Learning from Demonstration and Reinforcement Learning via Representation Sharing
M. Tuluhan Akbulut, Erhan Oztop, M. Yunus Seker, Honghu Xue, Ahmet E. Tekden, Emre Ugur
CoRL 2021 - Accepted Oral Spotlight
2020
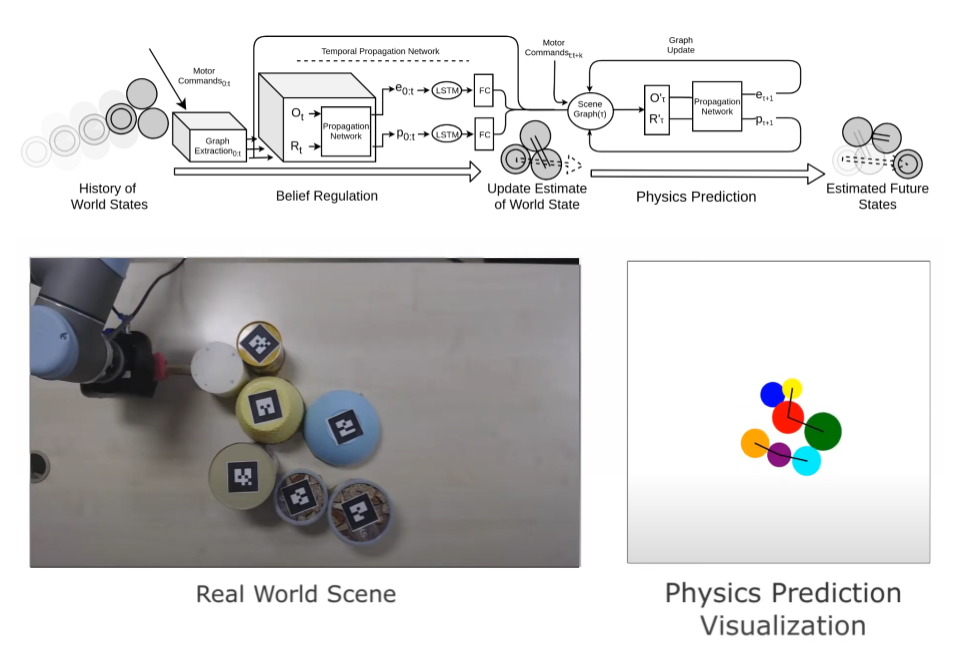
Belief Regulated Dual Propagation Nets for Learning Action Effects on Groups of Articulated Objects
Ahmet E. Tekden, Aykut Erdem, Erkut Erdem, Mert Imre, M. Yunus Seker, Emre Ugur
IROS 2020 - Accepted
Belief Regulated Dual Propagation Nets for Learning Action Effects on Groups of Articulated Objects
Ahmet E. Tekden, Aykut Erdem, Erkut Erdem, Mert Imre, M. Yunus Seker, Emre Ugur
IROS 2020 - Accepted
2019
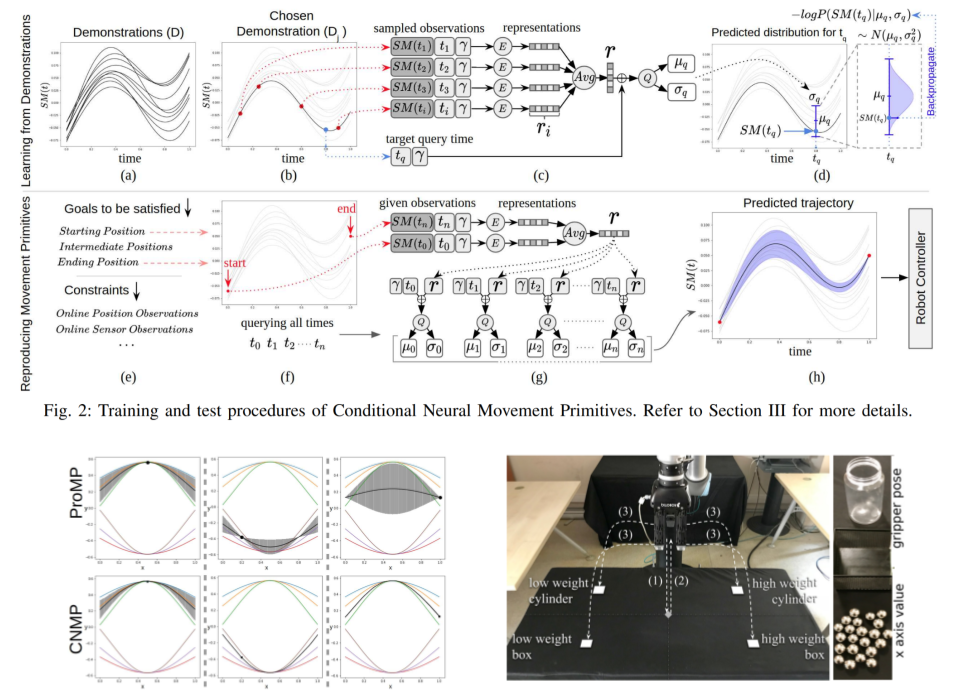
Conditional Neural Movement Primitives
M. Yunus Seker, Mert Imre, Justus Piater, Emre Ugur
RSS 2019 - Accepted
Conditional Neural Movement Primitives
M. Yunus Seker, Mert Imre, Justus Piater, Emre Ugur
RSS 2019 - Accepted
Deep Effect Trajectory Prediction in Robot Manipulation
M. Yunus Seker, Ahmet E. Tekden, Emre Ugur
RAS 2019 - Accepted
Deep Effect Trajectory Prediction in Robot Manipulation
M. Yunus Seker, Ahmet E. Tekden, Emre Ugur
RAS 2019 - Accepted